 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperValid: Capability-Aligned OOD Validation for Generalizable Downstream Scaling
May 27, 2026Scaling laws guide large language model training by relating compute to cross-entropy loss, and recent work further extends them to predict downstream benchmark performance. However, prior approaches face generalization limitations from two aspects: focusing on benchmark-level performance introduces scenario-specific artifacts, while relying on IID validation loss fails to track capability improvements when training distributions vary. In this work, we argue that downstream scaling should be studied at the capability level, which captures shared skill factors across related tasks while abstracting away benchmark-specific noise. We propose SuperValid, a framework that synthesizes OOD (out-of-distribution), capability-aligned validation data by distilling core concepts from benchmarks within a capability domain and expanding them into diverse, knowledge-rich texts. Extensive experiments spanning 17 benchmarks grouped into 6 capability domains show that SuperValid loss exhibits strong and stable correlation with downstream performance across models of different architectures, scales, and training data distributions. As a training-free metric computable during training without benchmark evaluation, SuperValid enables effective model selection, early stopping, and scaling decisions.
DPEPO: Diverse Parallel Exploration Policy Optimization for LLM-based Agents
Apr 27, 2026Large language model (LLM) agents that follow the sequential "reason-then-act" paradigm have achieved superior performance in many complex tasks.However, these methods suffer from limited exploration and incomplete environmental understanding, as they interact with only a single environment per step. In this paper, we first introduce a novel paradigm that enables an agent to interact with multiple environments simultaneously and share cross-trajectory experiences. Building upon this paradigm, we further propose DPEPO, a reinforcement learning (RL) algorithm that encourages the agent to perform diverse parallel exploration. There are two stages in DPEPO: initial supervised fine-tuning (SFT) imparts basic parallel reasoning and action generation, followed by reinforcement learning stage with a hierarchical reward scheme. We design a parallel trajectory-level success reward and two step-level rewards: Diverse Action Reward and Diverse State Transition Reward, which actively penalize behavioral redundancy and promote broad exploration. Extensive experiments on ALFWorld and ScienceWorld show that DPEPO achieves state-of-the-art (SOTA) success rates, while maintaining comparable efficiency to strong sequential baselines. (Code is available at https://github.com/LePanda026/Code-for-DPEPO)
FAVE: Flow-based Average Velocity Establishment for Sequential Recommendation
Apr 06, 2026Generative recommendation has emerged as a transformative paradigm for capturing the dynamic evolution of user intents in sequential recommendation. While flow-based methods improve the efficiency of diffusion models, they remain hindered by the ``Noise-to-Data'' paradigm, which introduces two critical inefficiencies: prior mismatch, where generation starts from uninformative noise, forcing a lengthy recovery trajectory; and linear redundancy, where iterative solvers waste computation on modeling deterministic preference transitions. To address these limitations, we propose a Flow-based Average Velocity Establishment (Fave) framework for one-step generation recommendation that learns a direct trajectory from an informative prior to the target distribution. Fave is structured via a progressive two-stage training strategy. In Stage 1, we establish a stable preference space through dual-end semantic alignment, applying constraints at both the source (user history) and target (next item) to prevent representation collapse. In Stage 2, we directly resolve the efficiency bottlenecks by introducing a semantic anchor prior, which initializes the flow with a masked embedding from the user's interaction history, providing an informative starting point. Then we learn a global average velocity, consolidating the multi-step trajectory into a single displacement vector, and enforce trajectory straightness via a JVP-based consistency constraint to ensure one-step generation. Extensive experiments on three benchmarks demonstrate that Fave not only achieves state-of-the-art recommendation performance but also delivers an order-of-magnitude improvement in inference efficiency, making it practical for latency-sensitive scenarios.
PACE: Prefix-Protected and Difficulty-Aware Compression for Efficient Reasoning
Feb 12, 2026Language Reasoning Models (LRMs) achieve strong performance by scaling test-time computation but often suffer from ``overthinking'', producing excessively long reasoning traces that increase latency and memory usage. Existing LRMs typically enforce conciseness with uniform length penalties, which over-compress crucial early deduction steps at the sequence level and indiscriminately penalize all queries at the group level. To solve these limitations, we propose \textbf{\model}, a dual-level framework for prefix-protected and difficulty-aware compression under hierarchical supervision. At the sequence level, prefix-protected optimization employs decaying mixed rollouts to maintain valid reasoning paths while promoting conciseness. At the group level, difficulty-aware penalty dynamically scales length constraints based on query complexity, maintaining exploration for harder questions while curbing redundancy on easier ones. Extensive experiments on DeepSeek-R1-Distill-Qwen (1.5B/7B) demonstrate that \model achieves a substantial reduction in token usage (up to \textbf{55.7\%}) while simultaneously improving accuracy (up to \textbf{4.1\%}) on math benchmarks, with generalization ability to code, science, and general domains.
DSO-VSA: a Variable Stiffness Actuator with Decoupled Stiffness and Output Characteristics for Rehabilitation Robotics
Dec 21, 2025Stroke-induced motor impairment often results in substantial loss of upper-limb function, creating a strong demand for rehabilitation robots that enable safe and transparent physical human-robot interaction (pHRI). Variable stiffness actuators are well suited for such applications. However, in most existing designs, stiffness is coupled with the deflection angle, complicating both modeling and control. To address this limitation, this paper presents a variable stiffness actuator featuring decoupled stiffness and output behavior for rehabilitation robotics. The system integrates a variable stiffness mechanism that combines a variable-length lever with a hypocycloidal straight-line mechanism to achieve a linear torque-deflection relationship and continuous stiffness modulation from near zero to theoretically infinite. It also incorporates a differential transmission mechanism based on a planetary gear system that enables dual-motor load sharing. A cascade PI controller is further developed on the basis of the differential configuration, in which the position-loop term jointly regulates stiffness and deflection angle, effectively suppressing stiffness fluctuations and output disturbances. The performance of prototype was experimentally validated through stiffness calibration, stiffness regulation, torque control, decoupled characteristics, and dual-motor load sharing, indicating the potential for rehabilitation exoskeletons and other pHRI systems.
Proceedings of 1st Workshop on Advancing Artificial Intelligence through Theory of Mind
Apr 28, 2025



This volume includes a selection of papers presented at the Workshop on Advancing Artificial Intelligence through Theory of Mind held at AAAI 2025 in Philadelphia US on 3rd March 2025. The purpose of this volume is to provide an open access and curated anthology for the ToM and AI research community.
TS-Align: A Teacher-Student Collaborative Framework for Scalable Iterative Finetuning of Large Language Models
May 30, 2024



Mainstream approaches to aligning large language models (LLMs) heavily rely on human preference data, particularly when models require periodic updates. The standard process for iterative alignment of LLMs involves collecting new human feedback for each update. However, the data collection process is costly and challenging to scale. To address this issue, we introduce the "TS-Align" framework, which fine-tunes a policy model using pairwise feedback data automatically mined from its outputs. This automatic mining process is efficiently accomplished through the collaboration between a large-scale teacher model and a small-scale student model. The policy fine-tuning process can be iteratively repeated using on-policy generations within our proposed teacher-student collaborative framework. Through extensive experiments, we demonstrate that our final aligned policy outperforms the base policy model with an average win rate of 69.7% across seven conversational or instruction-following datasets. Furthermore, we show that the ranking capability of the teacher is effectively distilled into the student through our pipeline, resulting in a small-scale yet effective reward model for policy model alignment.
xDial-Eval: A Multilingual Open-Domain Dialogue Evaluation Benchmark
Oct 13, 2023



Recent advancements in reference-free learned metrics for open-domain dialogue evaluation have been driven by the progress in pre-trained language models and the availability of dialogue data with high-quality human annotations. However, current studies predominantly concentrate on English dialogues, and the generalization of these metrics to other languages has not been fully examined. This is largely due to the absence of a multilingual dialogue evaluation benchmark. To address the issue, we introduce xDial-Eval, built on top of open-source English dialogue evaluation datasets. xDial-Eval includes 12 turn-level and 6 dialogue-level English datasets, comprising 14930 annotated turns and 8691 annotated dialogues respectively. The English dialogue data are extended to nine other languages with commercial machine translation systems. On xDial-Eval, we conduct comprehensive analyses of previous BERT-based metrics and the recently-emerged large language models. Lastly, we establish strong self-supervised and multilingual baselines. In terms of average Pearson correlations over all datasets and languages, the best baseline outperforms OpenAI's ChatGPT by absolute improvements of 6.5% and 4.6% at the turn and dialogue levels respectively, albeit with much fewer parameters. The data and code are publicly available at https://github.com/e0397123/xDial-Eval.
Overview of Robust and Multilingual Automatic Evaluation Metrics for Open-Domain Dialogue Systems at DSTC 11 Track 4
Jun 22, 2023



The advent and fast development of neural networks have revolutionized the research on dialogue systems and subsequently have triggered various challenges regarding their automatic evaluation. Automatic evaluation of open-domain dialogue systems as an open challenge has been the center of the attention of many researchers. Despite the consistent efforts to improve automatic metrics' correlations with human evaluation, there have been very few attempts to assess their robustness over multiple domains and dimensions. Also, their focus is mainly on the English language. All of these challenges prompt the development of automatic evaluation metrics that are reliable in various domains, dimensions, and languages. This track in the 11th Dialogue System Technology Challenge (DSTC11) is part of the ongoing effort to promote robust and multilingual automatic evaluation metrics. This article describes the datasets and baselines provided to participants and discusses the submission and result details of the two proposed subtasks.
DMRST: A Joint Framework for Document-Level Multilingual RST Discourse Segmentation and Parsing
Oct 09, 2021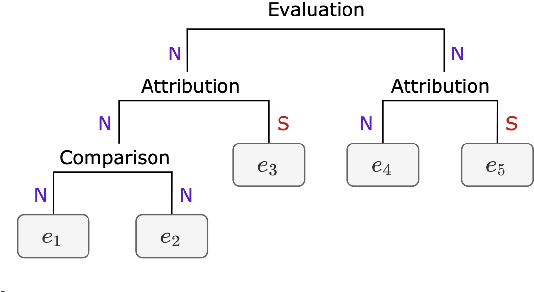
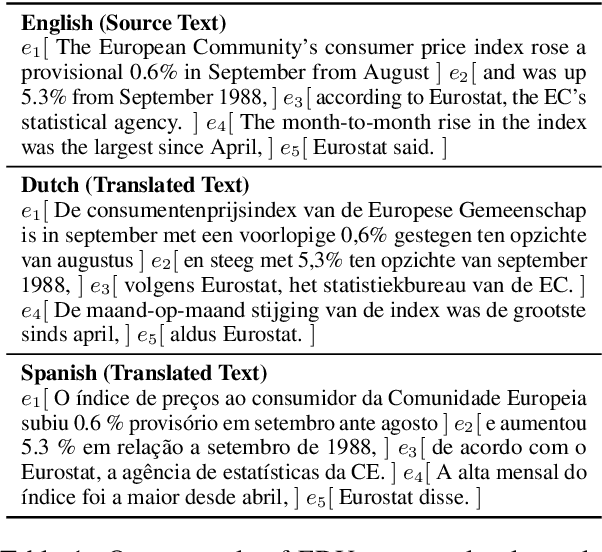
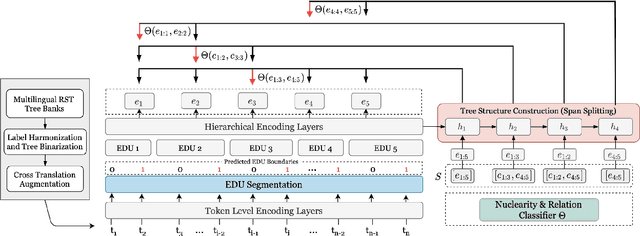
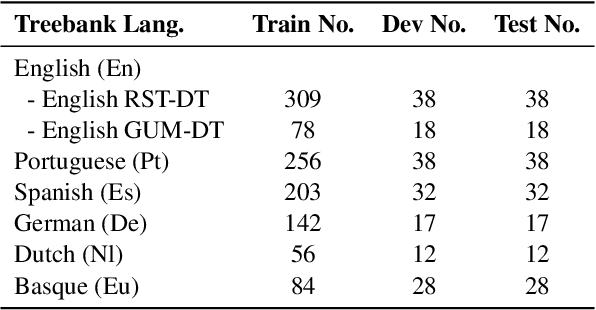
Text discourse parsing weighs importantly in understanding information flow and argumentative structure in natural language, making it beneficial for downstream tasks. While previous work significantly improves the performance of RST discourse parsing, they are not readily applicable to practical use cases: (1) EDU segmentation is not integrated into most existing tree parsing frameworks, thus it is not straightforward to apply such models on newly-coming data. (2) Most parsers cannot be used in multilingual scenarios, because they are developed only in English. (3) Parsers trained from single-domain treebanks do not generalize well on out-of-domain inputs. In this work, we propose a document-level multilingual RST discourse parsing framework, which conducts EDU segmentation and discourse tree parsing jointly. Moreover, we propose a cross-translation augmentation strategy to enable the framework to support multilingual parsing and improve its domain generality. Experimental results show that our model achieves state-of-the-art performance on document-level multilingual RST parsing in all sub-tasks.